Working on getting sortBot (it really needs a name that is not sortBot, it is just kind of sad sounding)
to recognize colors
so now we have this-
 |
| held together with tape and DREAAAAMS. |
made mostly of tape and wires.
and also purple pipecleaners (this is what science looks like)
the two black boxes with circles that look like spiders eyes are the distance sensors.
and the thing you see in the middle is a switch-
the switch is meant to trigger the reflectance sensor-
which is kind of hidden underneath it from this angle.
 |
| wires like crazy!! |
We also added a speaker for testing the code we've assembled this far-
(it is great, it picks up interference from the motors reversing,
interference goes in, totally great noises come out)
(so anyway, on to actually important things-)
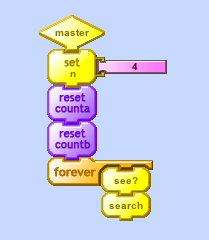
so now we've got the search code from before
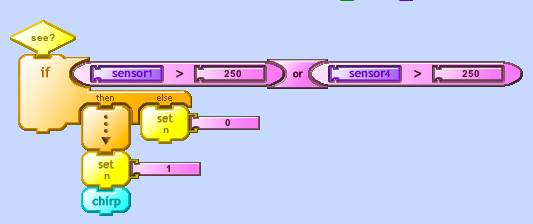
and a second code that identifies color when the switch is pressed.
right now the 'b' and 'w' methods just beep at different tones for testing.
It works pretty well!
it is correctly IDing colors anyway!
The search code was less effective today for some reason,
I figure it is because of inconsistencies in the proximity sensors or maybe their positioning?
It needs some work.