or "
ACTUALLY A LITTLE CREEPY?"
SO. 7 weeks in and it is just about time to start working on final projects here in RDS land.
The next couple of weeks are going to be difficult considering that my tastes seem to range from technical to super technical.
and the class seems to be ranging from story telling to super cute.
I am considering seeking out a robotics competition type goal because most of my ideas are 'i think this is technically super neat'
The idea I am leaning towards most is a number of individual robots, which would communicate and collaborate to achieve some goal. The idea of a spontaneous robot community of sorts is kind of extremely compelling (to me.)
I've considered robots that build things and robots that dance or something,
or play robo-tag
the thing that people seem to be most interested in is kind of where this idea originated from-
duckling-esque following robots?
 |
| i guess it is cute? |
I am having a little bit of trouble with this idea only because I feel that it is technically very simple?
I'd love to do something more advanced with the idea with collaborative robots in mind,
and while the collaborative robot idea sucks me in,
I have developed a few others while not musing about that-
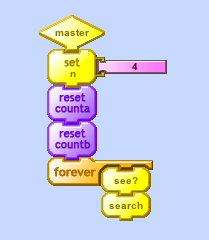
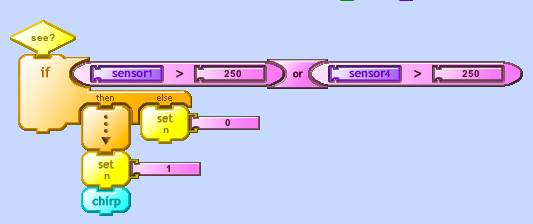
The first of which is related to the light seeking we did a while back,
maybe having a robot which would seek out and retrieve the light source then return to where it started?
the challenge would be in having the robot remember the path it took then execute it in reverse.
I am actually not sure how easy this would be?
I can definitely see it working in other programming languages, but a sticking point might be making it work in picoBlocks.
and the second is nontraditional motion which poses the problem of maybe not being so interesting to
look at
or even interesting from a non-mechanical stand point, the coding might not even be much to speak of depending.
(especially since there seems to be a lot of focus on the children that come to the exhibition)
(i am not so interested in outside interaction with the robots as i maybe should be)
a second problem is that I am not sure what the robot would do beyond walking
 |
| you can tell it is a robot because it has an antennae |
(or tossing itself about grotesquely)

















































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}