or "
Stupid robot cup"
SO CLOSE.
SO CLOSE TODAY.
ALMOST SO CLOSE.
 |
| SO MUCH CODE |
TODAY IT ALMOST WORKED YOU GUYS.
ALMOST.
ONCE THE KINKS ARE OUT OF THE SYSTEM WE WILL ADD THE LIGHT FOLLOWING AND THE SORT AND OH MY GOSH.
right-
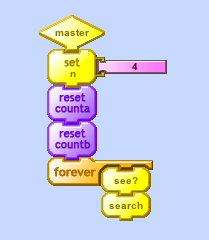
so, here is our current master-code.
n is set to a value with no associated....stuff.
and then the counters in both motors are reset because-
Our "plow search function depends on the count of the motors.
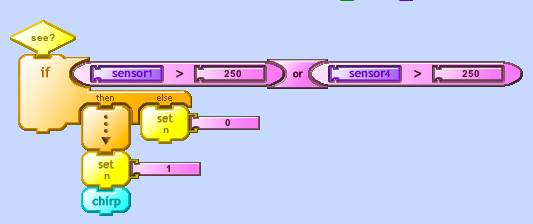
The plow function only operates when the n-variable is 0.
The n variable is 1 when-
either proximity sensor sees something.
(right now it chirps for testing purposes, man it is so annoying)
so when n=1, the search function is active-
it pretty much, just, um, searches.
yep.
and then once it grabs on the color is ID'd